Model properties (\(\nu\) fixed)
Created: 05-07-2024. Last modified: 21-01-2025.
Go back to the About page. To see how the covariance function changes when \(\nu\) changes, go to model_properties2.html.
This vignette illustrates how our proposed approach allows for Gaussian processes with general smoothness and non-stationary covariance on any compact metric graph. Recall that these processes are defined as solutions to \[\begin{equation}\label{SPDE}\tag{SPDE} (\kappa^2 - \Delta_{\Gamma})^{\alpha/2}(\tau u) = \mathcal{W}, \quad \text{on $\Gamma$}, \end{equation}\] where \(\Delta_{\Gamma}\) is the so-called Kirchhoff–Laplacian, \(\tau(\cdot)\) and \(\kappa(\cdot)\) are spatially varying functions that control the marginal variance and practical correlation range, respectively, \(\alpha>1/2\) controls the smoothness, and \(\mathcal{W}\) is Gaussian white noise defined on a probability space \(\left(\Omega,\mathcal{F},\mathbb{P}\right)\).
Below we set some global options for all code chunks in this document.
# Set seed for reproducibility
set.seed(1982)
# Set global options for all code chunks
knitr::opts_chunk$set(
# Disable messages printed by R code chunks
message = FALSE,
# Disable warnings printed by R code chunks
warning = FALSE,
# Show R code within code chunks in output
echo = TRUE,
# Include both R code and its results in output
include = TRUE,
# Evaluate R code chunks
eval = TRUE,
# Enable caching of R code chunks for faster rendering
cache = FALSE,
# Align figures in the center of the output
fig.align = "center",
# Enable retina display for high-resolution figures
retina = 2,
# Show errors in the output instead of stopping rendering
error = TRUE,
# Do not collapse code and output into a single block
collapse = FALSE
)
# Start the figure counter
fig_count <- 0
# Define the captioner function
captioner <- function(caption) {
fig_count <<- fig_count + 1
paste0("Figure ", fig_count, ": ", caption)
}
# Define the function to truncate a number to two decimal places
truncate_to_two <- function(x) {
floor(x * 100) / 100
}Below we load the necessary libraries and define the auxiliary functions.
library(rSPDE)
library(MetricGraph)
library(dplyr)
library(plotly)
library(scales)
library(patchwork)
library(tidyr)
library(here)
library(rmarkdown)
# Cite all loaded packages
library(grateful) Below we define function compute_pcr(), which computes
the practical correlation. It receives the output of the rSPDE::spde.matern.operators()
function (when evaluated on compatible parameters) and a threshold
cor_threshold. Using the correlation matrix and the
geodesic distance matrix, for each point in the mesh, it computes the
practical correlation range as the minimum geodesic distance such that
the correlation is below a given threshold cor_threshold
(usually defined as 0.1). The function returns a vector with the
practical correlation range for each point in the mesh.
Press the Show button below to reveal the code.
compute_pcr <- function(op, cor_threshold) {
# Compute the covariance matrix
cov_matrix <- op$covariance_mesh()
# Compute the correlation matrix
cor_matrix <-cov2cor(cov_matrix)
# Compute the geodesic distance matrix
op$graph$compute_geodist_mesh()
# Extract the geodesic distance matrix
dist_matrix <- op$graph$mesh$geo_dist
# Initialize the vector to store the practical correlation range
pcr <- numeric(dim(cor_matrix)[1])
process_row <- function(row_index) {
# For each row_index, create an auxiliary matrix aux_mat with the correlation and geodesic distance
aux_mat <- cbind(cor_matrix[row_index, ], dist_matrix[row_index, ])
# Order the auxiliary matrix by the geodesic distance
ordered_aux_mat <- aux_mat[order(aux_mat[, 2]), ]
# Filter the auxiliary ordered matrix by the correlation threshold
filtered_aux_mat <- ordered_aux_mat[ordered_aux_mat[,1] < cor_threshold, ]
if (nrow(filtered_aux_mat) > 0) {
# Return the minimum geodesic distance such that the correlation is below the threshold
return(filtered_aux_mat[1, 2])
} else {
# If the condition is not satisfied, record the minimum correlation value and return an error message
min <- min(aux_mat[, 1])
stop(paste0("The condition cor_matrix[row_index, ] < cor_threshold is not satisfied for row_index = ",
row_index, ". Increase cor_threshold. The minimum value of cor_matrix[row_index, ] is ",
min))
}
}
pcr <- sapply(1:dim(cor_matrix)[1], process_row)
return(pcr)
}Below we build the MetricGraph package’s logo graph and
plot the mesh.
# This is a function from MetricGraph package that returns a list of edges
edges <- logo_lines()
# Create a new graph object
logo_graph <- metric_graph$new(edges = edges, perform_merges = TRUE)
# Prune the vertices
#logo_graph$prune_vertices()
# Build the mesh
logo_graph$build_mesh(h = 0.05)
# Extract the mesh locations in Euclidean coordinates
xypoints <- logo_graph$mesh$V
# Create a plot of the mesh
plot_mesh <- logo_graph$plot(mesh = TRUE) +
ggtitle("Mesh") +
theme_minimal() +
theme(text = element_text(family = "Palatino"))
print(plot_mesh)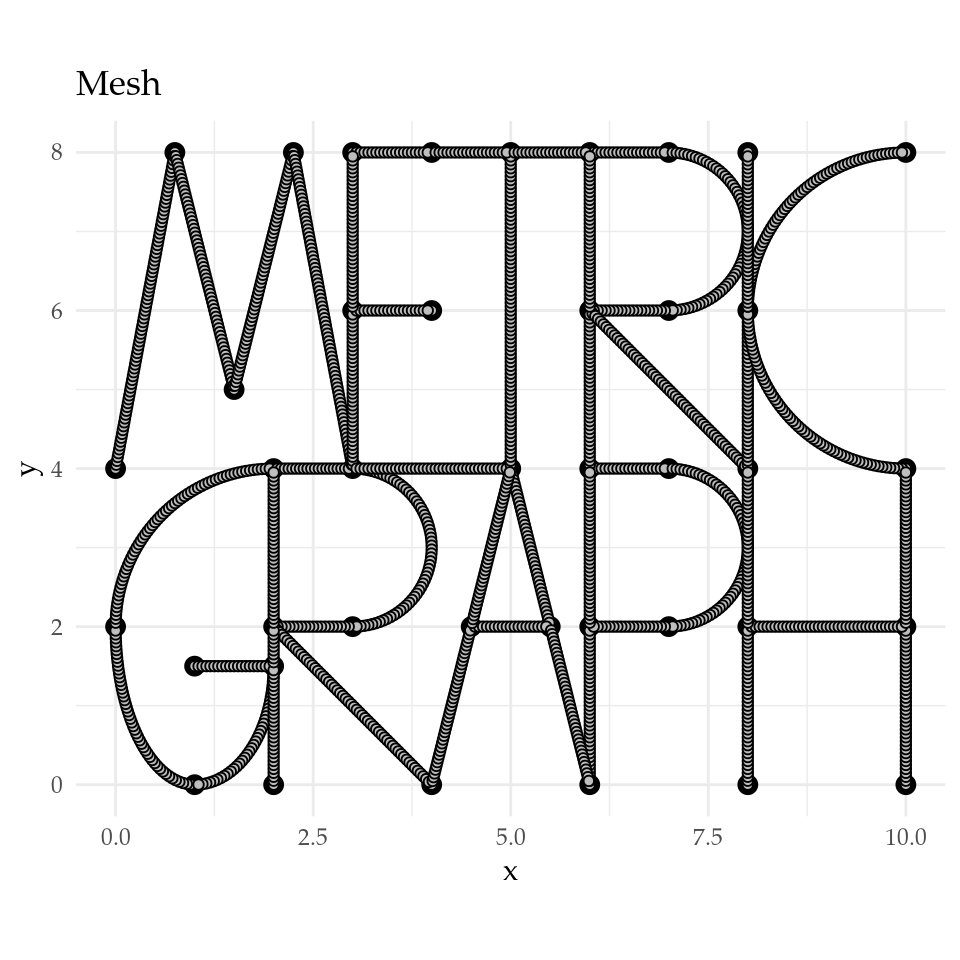
Figure 1: Mesh of the MetricGraph package’s logo.
Non-stationary features
Below we define \(\tau(\cdot)\)
(model_for_tau) and \(\kappa(\cdot)\)
(model_for_kappa) in \(\eqref{SPDE}\) as \(\tau(s) = \exp(0.05\cdot(x(s)-y(s)))\) and
\(\kappa(s) =
\exp(0.1\cdot(x(s)-y(s)))\), where \((x(s),y(s))\) are Euclidean coordinates on
the plane. These choices make \(\tau(\cdot)\) and \(\kappa(\cdot)\) large in the bottom-right
region of the MetricGraph package’s logo, as shown in
Figure 2.
# Define an auxiliary variable
aux <- 0.1*(xypoints[,1] - xypoints[,2])
# Define the matrices B.tau and B.kappa
B.tau = cbind(0, 1, 0, 0.5*aux, 0)
B.kappa = cbind(0, 0, 1, 0, aux)
# Log-regression coefficients
theta <- c(0, 0, 1, 1)
# Define the models for tau and kappa
model_for_tau <- exp(B.tau[,-1]%*%theta)
model_for_kappa <- exp(B.kappa[,-1]%*%theta)Below we choose \(\alpha = 0.9\) and compute the covariance matrix, the practical correlation range, and the standard deviation.
# Choose alpha
nu = 0.4
alpha = nu + 1/2
# Compute the operator
op <- rSPDE::spde.matern.operators(graph = logo_graph,
B.tau = B.tau,
B.kappa = B.kappa,
parameterization = "spde",
theta = theta,
alpha = alpha)
# Compute the covariance matrix
est_cov_matrix <- op$covariance_mesh()
# Compute the practical correlation range
cor_threshold <- 0.1
est_range <- compute_pcr(op, cor_threshold)
# Compute the standard deviation
est_sigma <- sqrt(Matrix::diag(est_cov_matrix))Below we plot the models for \(\tau(\cdot)\) and \(\kappa(\cdot)\), the practical correlation range, and the standard deviation. The blue, red, and green points represent the locations \(s_1\), \(s_2\), and \(s_3\), respectively.
Press the Show button below to reveal the code.
# Choose three points
point1 <- c(0.5670, 7.0243)
point2 <- c(0.03971546, 2.39628)
point3 <- c(10, 3)
# Find the indices of the three points
m1 <- which.min((xypoints[,1]-point1[1])^2 + (xypoints[,2]-point1[2])^2)
m2 <- which.min((xypoints[,1]-point2[1])^2 + (xypoints[,2]-point2[2])^2)
m3 <- which.min((xypoints[,1]-point3[1])^2 + (xypoints[,2]-point3[2])^2)
# Create a plot of the model for tau
TAU <- logo_graph$plot_function(X = model_for_tau, vertex_size = 0, plotly = FALSE) +
ggtitle("Model for tau") +
theme_minimal() +
theme(text = element_text(family = "Palatino"))
# Create a plot of the model for kappa
KAPPA <- logo_graph$plot_function(X = model_for_kappa, vertex_size = 0, plotly = FALSE) +
ggtitle("Model for kappa") +
theme_minimal() +
theme(text = element_text(family = "Palatino"))
# Create a plot for the practical correlation range
r1 <- logo_graph$plot_function(X = est_range, vertex_size = 0) +
ggtitle("Practical correlation range") +
theme_minimal() +
theme(text = element_text(family = "Palatino")) +
annotate("point", x = xypoints[m1,1], y = xypoints[m1,2], size = 1, color = "blue") +
annotate("point", x = xypoints[m2,1], y = xypoints[m2,2], size = 1, color = "red") +
annotate("point", x = xypoints[m3,1], y = xypoints[m3,2], size = 1, color = "darkgreen") +
annotate("text", x = xypoints[m1,1] + 0.1, y = xypoints[m1,2] - 0.4, label = "s[1]", parse = TRUE, size = 3, hjust = 0, color = "black") +
annotate("text", x = xypoints[m2,1] + 0.4, y = xypoints[m2,2], label = "s[2]", parse = TRUE, size = 3, hjust = 0, color = "black") +
annotate("text", x = xypoints[m3,1] - 0.8, y = xypoints[m3,2], label = "s[3]", parse = TRUE, size = 3, hjust = 0, color = "black")
# Create a plot for the standard deviation
s1 <- logo_graph$plot_function(X = est_sigma, vertex_size = 0) +
ggtitle("Standard deviation") +
theme_minimal() +
theme(text = element_text(family = "Palatino")) +
annotate("point", x = xypoints[m1,1], y = xypoints[m1,2], size = 1, color = "blue") +
annotate("point", x = xypoints[m2,1], y = xypoints[m2,2], size = 1, color = "red") +
annotate("point", x = xypoints[m3,1], y = xypoints[m3,2], size = 1, color = "darkgreen") +
annotate("text", x = xypoints[m1,1] + 0.1, y = xypoints[m1,2] - 0.4, label = "s[1]", parse = TRUE, size = 3, hjust = 0, color = "black") +
annotate("text", x = xypoints[m2,1] + 0.4, y = xypoints[m2,2], label = "s[2]", parse = TRUE, size = 3, hjust = 0, color = "black") +
annotate("text", x = xypoints[m3,1] - 0.8, y = xypoints[m3,2], label = "s[3]", parse = TRUE, size = 3, hjust = 0, color = "black")
# Combine the four plots
four_plots <- (TAU + KAPPA) / (s1 + r1)
# Save the combined plot
ggsave(here("data_files/four_plots.png"), plot = four_plots, width = 9.22, height = 7.05, dpi = 300)
# Print the combined plot
print(four_plots)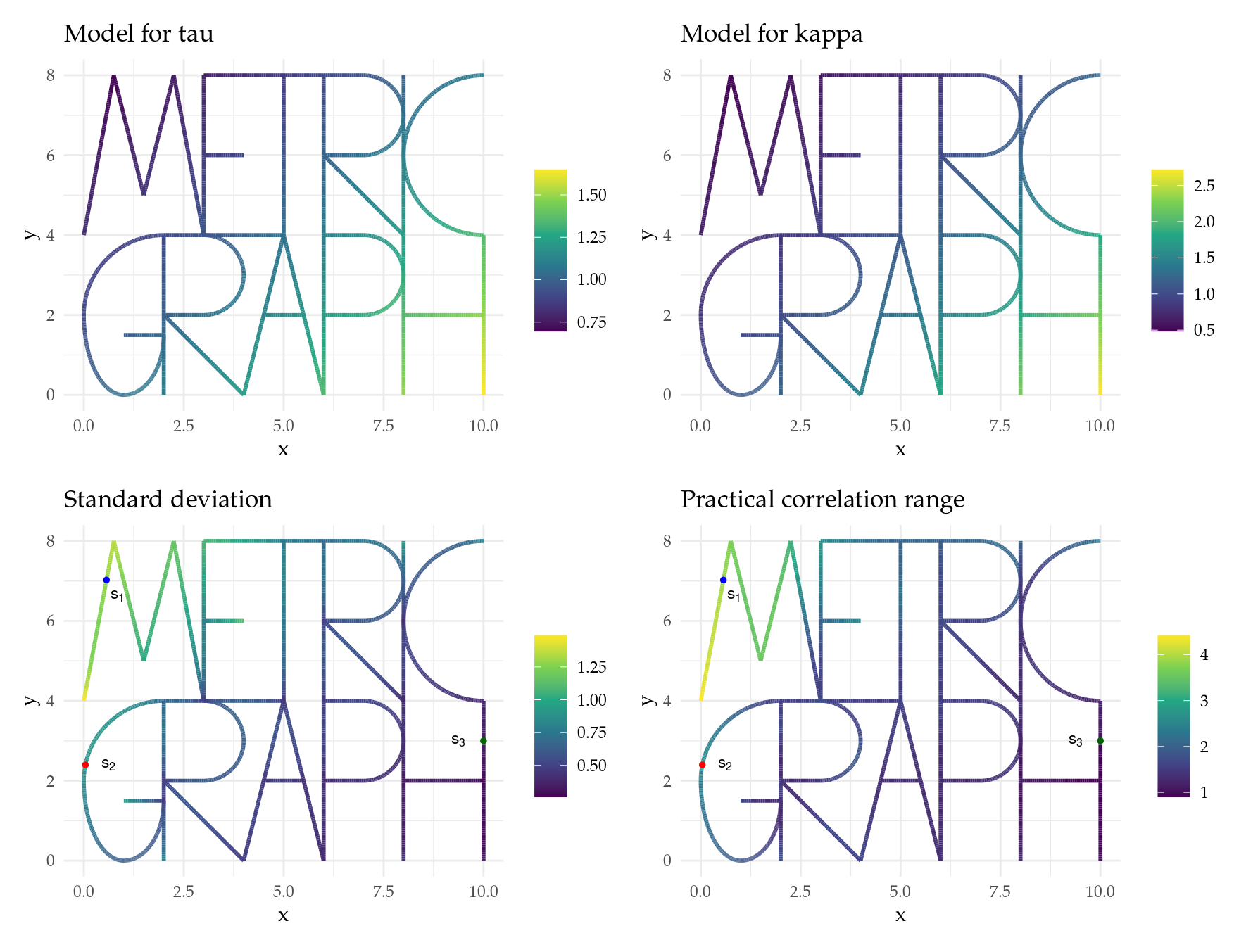
Figure 2: Top row: Non-stationary models for \(\tau(\cdot)\) and \(\kappa(\cdot)\). Bottom row: Non-stationary
standard deviation and practical correlation range on the
MetricGraph package’s logo.
Covariance plots
Below we plot the covariance functions \(r_i(\cdot)=\text{Cov}(u(s_i),u(\cdot))\),
\(i=1,2,3\), for three locations with
different standard deviations and practical correlation ranges on the
MetricGraph package’s logo.
Press the Show button below to reveal the code.
# Create a plot for the covariance between point1 and all other points
c1 <- logo_graph$plot_function(X = est_cov_matrix[m1, ], vertex_size = 0) +
ggtitle(latex2exp::TeX("$r_1$")) +
theme_minimal() +
theme(text = element_text(family = "Palatino"),
plot.title = element_text(size = 12)) +
annotate("point", x = xypoints[m1,1], y = xypoints[m1,2], size = 1, color = "blue") +
annotate("text", x = xypoints[m1,1] + 0.1, y = xypoints[m1,2] - 0.4, label = "s[1]", parse = TRUE, size = 3, hjust = 0, color = "black")
# Create a plot for the covariance between point2 and all other points
c2 <- logo_graph$plot_function(X = est_cov_matrix[m2, ], vertex_size = 0) +
ggtitle(latex2exp::TeX("$r_2$")) +
theme_minimal() +
theme(text = element_text(family = "Palatino"),
plot.title = element_text(size = 12)) +
annotate("point", x = xypoints[m2,1], y = xypoints[m2,2], size = 1, color = "red") +
annotate("text", x = xypoints[m2,1] + 0.4, y = xypoints[m2,2], label = "s[2]", parse = TRUE, size = 3, hjust = 0, color = "black")
# Create a plot for the covariance between point3 and all other points
c3 <- logo_graph$plot_function(X = est_cov_matrix[m3, ], vertex_size = 0) +
ggtitle(latex2exp::TeX("$r_3$")) +
theme_minimal() +
theme(text = element_text(family = "Palatino"),
plot.title = element_text(size = 12)) +
annotate("point", x = xypoints[m3,1], y = xypoints[m3,2], size = 1, color = "darkgreen") +
annotate("text", x = xypoints[m3,1] - 0.8, y = xypoints[m3,2], label = "s[3]", parse = TRUE, size = 3, hjust = 0, color = "black")
# Combine the three plots
cs <- c1 + c2 + c3
# Save the combined plot
ggsave(here("data_files/cov_plots_diff_loc.png"), plot = cs, width = 13.83, height = 4.5, dpi = 300)
# Print the combined plot
print(cs)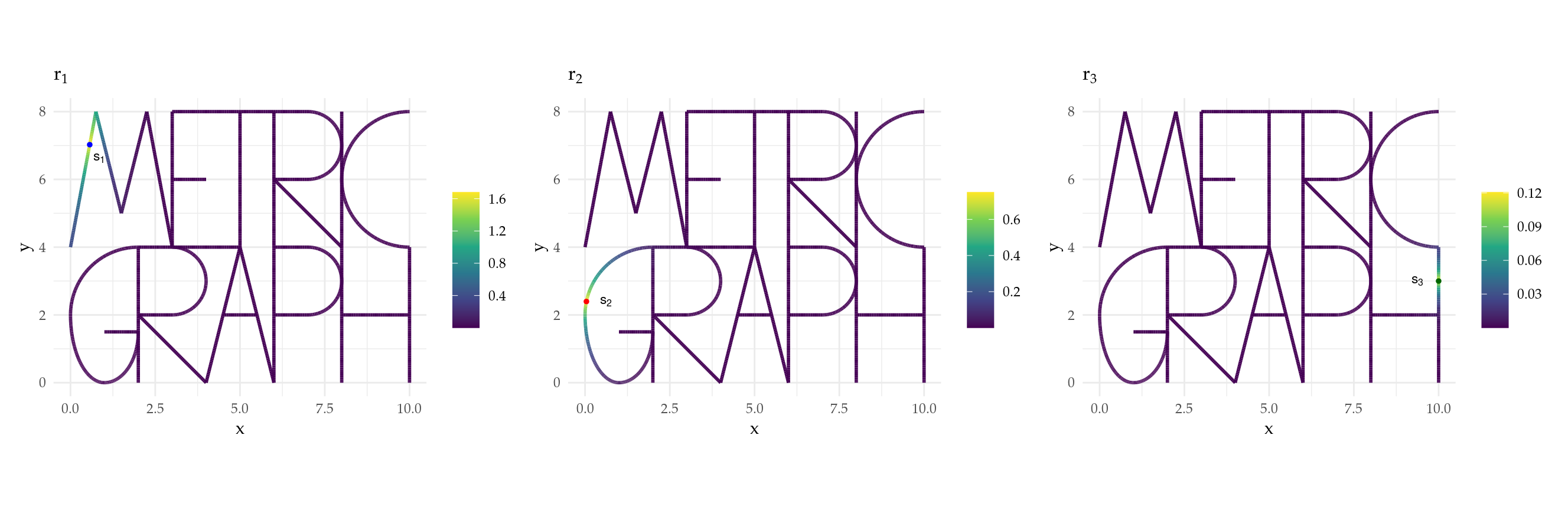
Figure 3: Example of covariance functions \(r_i(\cdot)\), \(i=1,2,3\) for three locations with
different standard deviations and practical correlation ranges on the
MetricGraph package’s logo.
Below we show 3D plots of the covariance functions \(r_i(\cdot)\), \(i=1,2,3\), for three locations with
different standard deviations and practical correlation ranges on the
MetricGraph package’s logo. The practical correlation range
\(\rho(s_i)\) and the standard
deviation \(\sigma(s_i)\) are also
shown for each location \(s_i\).
Press the Show button below to reveal the code.
p1 <- logo_graph$plot_function(X = est_cov_matrix[m1, ], vertex_size = 1, plotly = TRUE, edge_color = "black", edge_width = 3, line_color = "blue", line_width = 3)
p2 <- logo_graph$plot_function(X = est_cov_matrix[m2, ], vertex_size = 1, plotly = TRUE, edge_color = "black", edge_width = 3, line_color = "red", line_width = 3, p = p1)
p3 <- logo_graph$plot_function(X = est_cov_matrix[m3, ], vertex_size = 1, plotly = TRUE, edge_color = "black", edge_width = 3, line_color = "darkgreen", line_width = 3, p = p2)
p <- p3 %>%
config(mathjax = 'cdn') %>%
layout(font = list(family = "Palatino"),
showlegend = FALSE,
scene = list(
aspectratio = list(x = 1.8, y = 1.8, z = 1.8),
camera = list(
eye = list(x = 3, y = 2, z = 0.5), # Adjust the viewpoint
center = list(x = 0, y = 0, z = 0)), # Focus point
annotations = list(
list(
x = 3, y = 4, z = 1.4,
text = TeX("\\rho(s_i)"),
textangle = 0, ax = 60, ay = 0,
font = list(color = "black", size = 16),
arrowcolor = "white", arrowsize = 1, arrowwidth = 0.1, arrowhead = 1),
list(
x = 3, y = 4, z = 1.23,
text = TeX(paste0("\\bullet\\mbox{ ", truncate_to_two(est_range[m1]), "}")),
textangle = 0, ax = 60, ay = 0,
font = list(color = "blue", size = 16),
arrowcolor = "white", arrowsize = 1, arrowwidth = 0.1, arrowhead = 1),
list(
x = 3, y = 4, z = 1.11,
text = TeX(paste0("\\bullet\\mbox{ ", truncate_to_two(est_range[m2]), "}")),
textangle = 0, ax = 60, ay = 0,
font = list(color = "red", size = 16),
arrowcolor = "white", arrowsize = 1, arrowwidth = 0.1, arrowhead = 1),
list(
x = 3, y = 4, z = 0.99,
text = TeX(paste0("\\bullet\\mbox{ ", truncate_to_two(est_range[m3]), "}")),
textangle = 0, ax = 60, ay = 0,
font = list(color = "darkgreen", size = 16),
arrowcolor = "white", arrowsize = 1, arrowwidth = 0.1, arrowhead = 1),
list(
x = 3, y = 6, z = 1.4,
text = TeX("\\sigma(s_i)"),
textangle = 0, ax = 60, ay = 0,
font = list(color = "black", size = 16),
arrowcolor = "white", arrowsize = 1, arrowwidth = 0.1, arrowhead = 1),
list(
x = 3, y = 6, z = 1.23,
text = TeX(paste0("\\bullet\\mbox{ ", truncate_to_two(est_sigma[m1]), "}")),
textangle = 0, ax = 60, ay = 0,
font = list(color = "blue", size = 16),
arrowcolor = "white", arrowsize = 1, arrowwidth = 0.1, arrowhead = 1),
list(
x = 3, y = 6, z = 1.11,
text = TeX(paste0("\\bullet\\mbox{ ", truncate_to_two(est_sigma[m2]), "}")),
textangle = 0, ax = 60, ay = 0,
font = list(color = "red", size = 16),
arrowcolor = "white", arrowsize = 1, arrowwidth = 0.1, arrowhead = 1),
list(
x = 3, y = 6, z = 0.99,
text = TeX(paste0("\\bullet\\mbox{ ", truncate_to_two(est_sigma[m3]), "}")),
textangle = 0, ax = 60, ay = 0,
font = list(color = "darkgreen", size = 16),
arrowcolor = "white", arrowsize = 1, arrowwidth = 0.1, arrowhead = 1),
list(
x = 3, y = 8, z = 1.4,
text = TeX("\\alpha"),
textangle = 0, ax = 60, ay = 0,
font = list(color = "black", size = 16),
arrowcolor = "white", arrowsize = 1, arrowwidth = 0.1, arrowhead = 1),
list(
x = 3, y = 8, z = 1.23,
text = TeX(paste0("\\bullet\\mbox{ ", alpha, "}")),
textangle = 0, ax = 60, ay = 0,
font = list(color = "black", size = 16),
arrowcolor = "white", arrowsize = 1, arrowwidth = 0.1, arrowhead = 1),
list(
x = 8.5, y = 0.5, z = 0,
text = TeX("s_1"),
textangle = 0, ax = 0, ay = 15,
font = list(color = "black", size = 16),
arrowcolor = "white", arrowsize = 1, arrowwidth = 0.1, arrowhead = 1),
list(
x = 2.5, y = 0, z = 0,
text = TeX("s_2"),
textangle = 0, ax = 0, ay = 15,
font = list(color = "black", size = 16),
arrowcolor = "white", arrowsize = 1, arrowwidth = 0.1, arrowhead = 1),
list(
x = 3, y = 10, z = 0,
text = TeX("s_3"),
textangle = 0, ax = 0, ay = 15,
font = list(color = "black", size = 16),
arrowcolor = "white", arrowsize = 1, arrowwidth = 0.1, arrowhead = 1),
list(
x = xypoints[m1, 2], y = xypoints[m1, 1], z = max(est_cov_matrix[m1, ]) + 0.2,
text = TeX("r_1(\\cdot)"),
textangle = 0, ax = 0, ay = 15,
font = list(color = "blue", size = 16),
arrowcolor = "white", arrowsize = 1, arrowwidth = 0.1, arrowhead = 1),
list(
x = xypoints[m2, 2], y = xypoints[m2, 1], z = max(est_cov_matrix[m2, ]) + 0.2,
text = TeX("r_2(\\cdot)"),
textangle = 0, ax = 0, ay = 15,
font = list(color = "red", size = 16),
arrowcolor = "white", arrowsize = 1, arrowwidth = 0.1, arrowhead = 1),
list(
x = xypoints[m3, 2], y = xypoints[m3, 1], z = max(est_cov_matrix[m3, ]) + 0.2,
text = TeX("r_3(\\cdot)"),
textangle = 0, ax = 0, ay = 15,
font = list(color = "darkgreen", size = 16),
arrowcolor = "white", arrowsize = 1, arrowwidth = 0.1, arrowhead = 1)))) %>%
add_trace(x = xypoints[m1, 2], y = xypoints[m1, 1], z = 0, mode = "markers", type = "scatter3d",
marker = list(size = 4, color = "blue", symbol = 104)) %>%
add_trace(x = xypoints[m2, 2], y = xypoints[m2, 1], z = 0, mode = "markers", type = "scatter3d",
marker = list(size = 4, color = "red", symbol = 104)) %>%
add_trace(x = xypoints[m3, 2], y = xypoints[m3, 1], z = 0, mode = "markers", type = "scatter3d",
marker = list(size = 4, color = "darkgreen", symbol = 104))
# Save the 3D plot
save(p, file = here("data_files/3d_cov_plots_diff_loc.RData"))
Figure 4: Example of covariance functions \(r_i(\cdot)\), \(i=1,2,3\) for three locations with
different standard deviations and practical correlation ranges on the
MetricGraph package’s logo.
Below we simulate the non-stationary field and plot the graph and the non-stationary field.
Press the Show button below to reveal the code.
# Simulate the non-stationary field
u_non_stat <- simulate(op)
# Plot the graph
plot_graph <- logo_graph$plot(vertex_size = 1, vertex_color = "blue") +
ggtitle(latex2exp::TeX("MetricGraph package's logo")) +
theme_minimal() +
theme(text = element_text(family = "Palatino"))
# Plot the non-stationary field
plot_sim <- logo_graph$plot_function(X = u_non_stat, vertex_size = 0) +
ggtitle("Simulated non-stationary process") +
theme_minimal() +
theme(text = element_text(family = "Palatino"))
# Combine the two plots
graph_plus_sim <- plot_graph + plot_sim
# Save the combined plot
ggsave(here("data_files/graph_plus_sim.png"), plot = graph_plus_sim, width = 9.22, height = 4.01, dpi = 300)
# Print the combined plot
print(graph_plus_sim)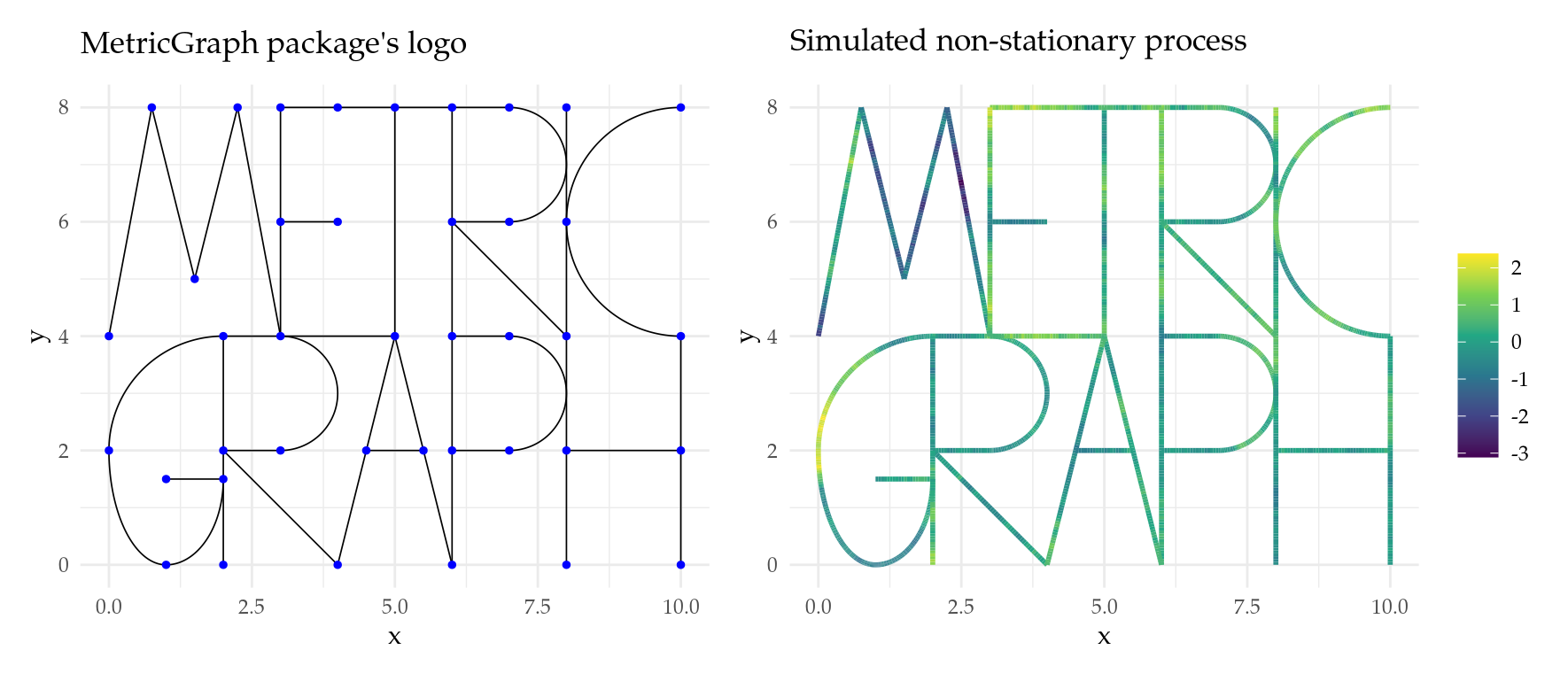
Figure 5: MetricGraph package’s logo and a simulated
non-stationary process on it.
Here a list of the packages used in this document.
We used R version 4.4.1 (R Core Team 2024a) and the following R packages: cowplot v. 1.1.3 (Wilke 2024), ggmap v. 4.0.0.900 (Kahle and Wickham 2013), ggpubr v. 0.6.0 (Kassambara 2023), ggtext v. 0.1.2 (Wilke and Wiernik 2022), grid v. 4.4.1 (R Core Team 2024b), here v. 1.0.1 (Müller 2020), htmltools v. 0.5.8.1 (Cheng et al. 2024), INLA v. 24.12.11 (Rue, Martino, and Chopin 2009; Lindgren, Rue, and Lindström 2011; Martins et al. 2013; Lindgren and Rue 2015; De Coninck et al. 2016; Rue et al. 2017; Verbosio et al. 2017; Bakka et al. 2018; Kourounis, Fuchs, and Schenk 2018), inlabru v. 2.12.0.9002 (Yuan et al. 2017; Bachl et al. 2019), knitr v. 1.48 (Xie 2014, 2015, 2024), latex2exp v. 0.9.6 (Meschiari 2022), Matrix v. 1.6.5 (Bates, Maechler, and Jagan 2024), MetricGraph v. 1.4.0.9000 (Bolin, Simas, and Wallin 2023b, 2023a, 2023c, 2024; Bolin et al. 2024), OpenStreetMap v. 0.4.0 (Fellows and JMapViewer library by Jan Peter Stotz 2023), osmdata v. 0.2.5 (Mark Padgham et al. 2017), patchwork v. 1.2.0 (Pedersen 2024), plotly v. 4.10.4 (Sievert 2020), plotrix v. 3.8.4 (J 2006), reshape2 v. 1.4.4 (Wickham 2007), rmarkdown v. 2.28 (Xie, Allaire, and Grolemund 2018; Xie, Dervieux, and Riederer 2020; Allaire et al. 2024), rSPDE v. 2.4.0.9000 (Bolin and Kirchner 2020; Bolin and Simas 2023; Bolin, Simas, and Xiong 2024), scales v. 1.3.0 (Wickham, Pedersen, and Seidel 2023), sf v. 1.0.19 (E. Pebesma 2018; E. Pebesma and Bivand 2023), sp v. 2.1.4 (E. J. Pebesma and Bivand 2005; Bivand, Pebesma, and Gomez-Rubio 2013), tidyverse v. 2.0.0 (Wickham et al. 2019), viridis v. 0.6.4 (Garnier et al. 2023), xaringanExtra v. 0.8.0 (Aden-Buie and Warkentin 2024).