Numerical approximation and optimal control of fractional diffusion equations on metric graphs
Lenin Rafael Riera Segura1, David Bolin1, Alexandre B. Simas1
1 Statistics Program, CEMSE, King Abdullah University of Science and Technology (KAUST), Thuwal, 23955-6900, Kingdom of Saudi Arabia
Introduction
We analyze and numerically approximate solutions to fractional diffusion equations on metric graphs of the form \[\begin{equation} \label{eq:maineqfirstpart} \tag{1} \left\{ \begin{aligned} \partial_t u(s,t) + L^{\alpha/2} u(s,t) &= f(s,t), \\ u(s,0) &= u_0(s), \end{aligned} \right. \end{equation}\] where \(L = \kappa^2 \! - \! \Delta_\Gamma\) and \(u(\cdot,t)\) satisfies the Kirchhoff vertex conditions \[\begin{equation} \label{eq:Kcondfirstpart} \tag{2} \textstyle\mathcal{K} = \left\{\phi\in C(\Gamma)\;\middle|\; \forall v\in \mathcal{V}:\; \sum_{e\in\mathcal{E}_v}\partial_e \phi(v)=0 \right\}. \end{equation}\] Here \(\Gamma = (\mathcal{V},\mathcal{E})\) is a compact metric graph, \(\kappa>0\), \(\alpha\in(0,2]\) determines the smoothness of \(u(\cdot,t)\), \(\Delta_{\Gamma}\) is the so-called Kirchhoff–Laplacian. The fractional operator \(L^{\alpha/2} : D(L^{\alpha/2}) \longmapsto L_2(\Gamma)\) is defined via \[\begin{equation} \label{lfractional} \textstyle \phi \longmapsto L^{\alpha/2}\phi = \sum_{j\in\mathbb{N}}\lambda_j^{\alpha/2}(\phi, e_j)_{L_2(\Gamma)}e_j, \end{equation}\] and \(-L^{\alpha/2}\) generates \(T(t)\phi = \sum_{j\in\mathbb{N}}e^{-\lambda^{\alpha/2}_jt}\left(\phi, e_j\right)_{L_2(\Gamma)}e_j\).
We interpret \(\eqref{eq:maineqfirstpart}\) as an abstract Cauchy problem in \(L_2(\Gamma)\), given by \[\begin{equation} \label{eq:cauchyproblem} \tag{3} \begin{cases} \partial_tu(t)+L^{\alpha/2}u(t)=f(t),\quad t\in (0, T),\\ u(0)=u_0\in D(L^{\alpha/2}). \end{cases} \end{equation}\]
Theorem 1. If \(f\in L_2((0,T);L_2(\Gamma))\) and \(u_0\in \dot{H}^{\alpha}(\Gamma)\), then \(\eqref{eq:cauchyproblem}\) has a unique mild solution given by the variation of parameters formula \[\begin{equation} \label{eq:mildsolution} u(t) = T(t)u_0 + \int_0^t T(t-r)f(r)dr,\quad t\geq 0. \end{equation}\]
Numerical Approximation
Let \(\kappa=1\). For all \(\phi\in V_h\) and \(k=0,\dots, N-1\), the discrete scheme computes \(U_h^{\tau}\subset V_h\), which solves \[\begin{equation} \label{system:fully_discrete_scheme} \tag{4} \left\{ \begin{aligned} \langle\delta U_h^{k+1},\phi\rangle + \mathfrak{a}( U_h^{k+1},\phi) &= \langle f^{k+1},\phi\rangle, \\ U^0_h &= P_hu_0, \end{aligned} \right. \end{equation}\]
The corresponding strong form of \(\eqref{system:fully_discrete_scheme}\) is given by \[\begin{align} \label{weak_form_m1} \tag{5} \textstyle (I_{V_h}+\tau L_h^{\alpha/2})U_h^{k+1} = U_h^{k}+\tau f^{k+1}. \end{align}\] By applying \(L_h^{-\alpha/2}\) to \(\eqref{weak_form_m1}\), replacing \(L_h^{-\alpha/2}\) with the rational approximation \(r_m(L_h^{-1})\) \(=\) \(p_\ell(L_h)^{-1}p_r(L_h)\), and using the partial-fraction expansion \(p_r(x)/(p_r(x)+\tau p_\ell(x))\) \(=\) \(\sum_{k=1}^{m+1}a_k(x-p_k)^{-1}\), we obtain \[\begin{align} \tag{6} \label{weak_form_m4} \textstyle U_{h,m}^{k+1}= \left(\sum_{k=1}^{m+1}a_k(L_h-p_kI_{V_h})^{-1}\right) (U_{h,m}^{k}+\tau f^{k+1}), \end{align}\] or in matrix form, \[\begin{align} \label{thenumericalscheme} \textstyle\mathbf{U}_{k+1} = \mathbf{R}(\mathbf{C}\mathbf{U}_k+\tau \mathbf{F}_{k+1}),\quad \mathbf{R} = \sum_{k=1}^{m+1} a_k\left(\mathbf{L}-p_k\mathbf{C}\right)^{-1}. \end{align}\]
Theorem 2. Let \(u\) be the solution to \(\eqref{eq:maineqfirstpart}\) and \(U^{\tau}_{h,m}\subset V_h\) solve the weak form of \(\eqref{weak_form_m4}\). If \(f\in L_\infty((0,T);L_2(\Gamma))\) and \(u_0\in\dot{H}^{\alpha}(\Gamma)\), then
\[\begin{align} \label{finalfinalestfirstpart} {\left\|u-U_{h,m}^\tau\right\|}_{L_2(\Gamma\times(0,T))}\lesssim\tau+h^\alpha + h^{\alpha-2}e^{-2\pi\sqrt{(1-\alpha/2)m}}. \end{align}\]
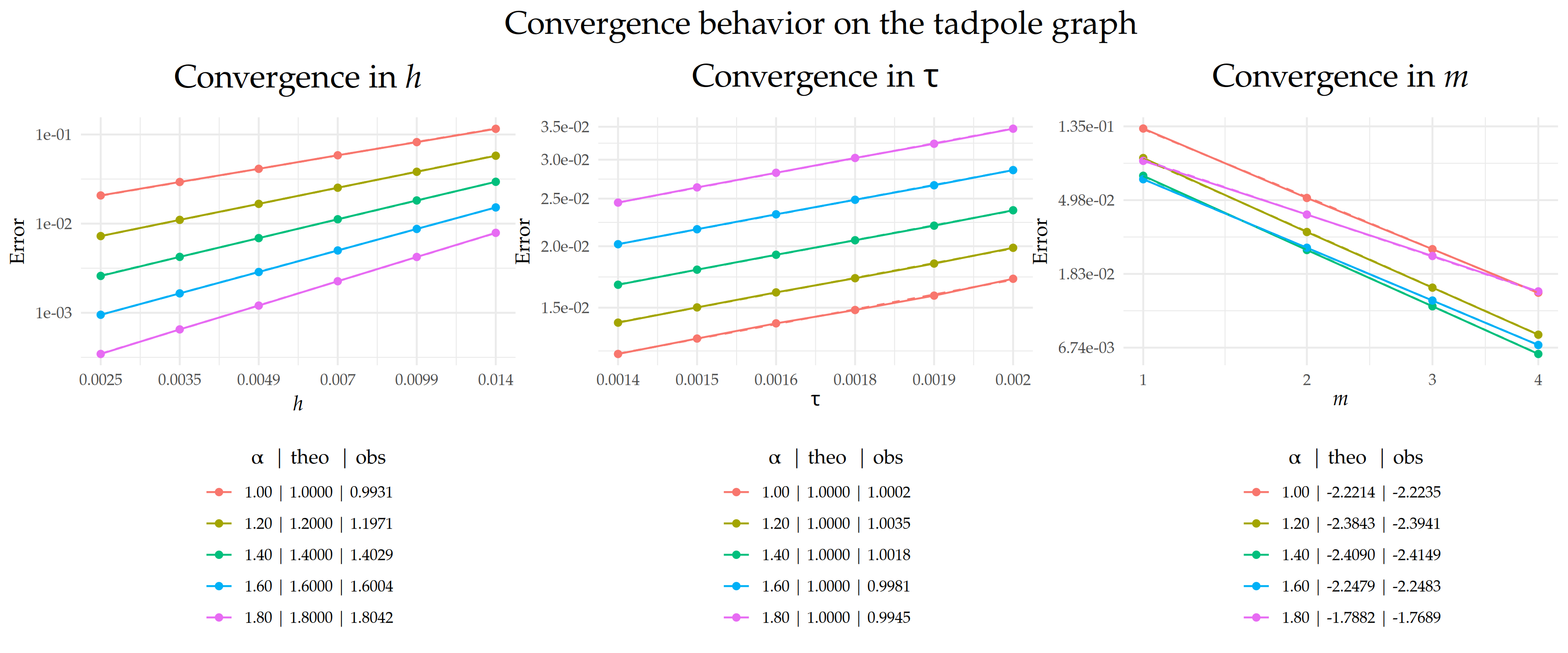
Figure 1: Comparison between theoretical and observed convergence behavior for the error \(\|u- U_{h,m}^\tau\|_{L_2(\Gamma\times(0,T))}\) with respect to \(h\), \(\tau\), and \(m\), where \(\Gamma\) is the tadpole graph. The left and center plots display the convergence rates in \(h\) and \(\tau\), respectively, on a \(\text{log}_{10}\)–\(\text{log}_{10}\) scale, while the right plot shows the exponential decay in \(m\) on a semi-\(\text{log}_{e}\) scale, with \(m\) plotted on a square-root scale. Dashed lines indicate the theoretical rates, and solid lines represent the observed error curves. The legend below each plot shows the value of \(\alpha\) along with the corresponding theoretical (‘theo’), and observed (‘obs’) rates for each case.
Optimal Control Problem
Let \(u_d\) be the desired state, \(z\) denote the control variable, and \(\mu>0\) a regularization parameter. We are concerned with the following PDE-constrained optimization problem: Find \[\begin{equation} \label{eq:min_pro} \tag{7} \min\; J(u, z)= \frac{1}{2} \int_0^T\left(\left\|u-u_d\right\|_{L_2(\Gamma)}^2+\mu\|z\|_{L_2(\Gamma)}^2\right) dt \end{equation}\] subject to the fractional diffusion equation \(\eqref{eq:maineqfirstpart}\) with right-hand side \(f+z\), where \(u\) satisfies the Kirchhoff vertex conditions \(\eqref{eq:Kcondfirstpart}\), and \(z\) satisfies the control constraints \[\begin{align} \tag{9} \label{control_constraints} a(s,t)\leq z(s,t)\leq b(s,t)\;\mathrm{a.e.}\;(s,t)\in\Gamma \times(0, T). \end{align}\] Associated to \(u = u(z)\), the adjoint state \(p=p(z)\) solves \[\begin{equation} \tag{10} \label{eq:adjointeq} \left\{ \begin{aligned} \!-\partial_t p(s,t)\! + \! (\kappa^2 \! - \! \Delta_\Gamma)^{\alpha/2} p(s,t) &= \! u(s,t) \! - \! u_d(s,t),\\ p(s,T) &= \! 0. \end{aligned} \right. \end{equation}\]
The optimal control variable \(\bar{z}\) is related to the optimal adjoint state \(\bar{p}\) via the projection formula \[\begin{align} \tag{11} \label{proj_formula} \bar{z} = \min\left\{b ,\max\left\{a ,-\bar{p}/\mu \right\}\right\}. \end{align}\]
Theorem 3. Let \(\bar{z}\) be the optimal control of problem \(\eqref{eq:min_pro}\)-\(\eqref{control_constraints}\) and \(\bar{Z}_{h,m}^\tau\) be the optimal discrete control. If \(f,u_d\in L_\infty((0,T);L_2(\Gamma))\) and \(u_0\in\dot{H}^{\alpha}(\Gamma)\), then
\[\begin{align} {\left\|\bar{z}- \bar{Z}_{h,m}^\tau\right\|}_{L_2(\Gamma\times(0,T))}\lesssim \tau+h^\alpha+ h^{\alpha-2}e^{-2\pi\sqrt{(1-\alpha/2)m}}. \end{align}\]
FBSM Algorithm
At a high level, FBSM follows these steps.
- Initialization: Choose an initial approximation for \(\bar{z}\).
- State solve: Using \(\bar{z}\), solve \(\eqref{eq:maineqfirstpart}\) with RHS \(f+\bar{z}\) to obtain \(\bar{u}\).
- Adjoint solve: Using \(\bar{u}\), solve \(\eqref{eq:adjointeq}\) to obtain \(\bar{p}\).
- Control update: Update \(\bar{z}\) via the projection formula \(\eqref{proj_formula}\).
- Iteration: Repeat steps b - d until convergence.
The fully discrete and vectorized form is given by
- Initialize \(\mathbf{\bar{z}}\),
- Compute \(\mathbf{\bar{u}} = \mathbf{h} + \mathbf{S}_{\mathrm{F}}\mathbf{\hat{R}}(\mathbf{f}+\mathbf{M}\mathbf{\bar{z}})\),
- Compute \(\mathbf{\bar{p}} = \mathbf{S}_{\mathrm{B}}\mathbf{\hat{R}}(\mathbf{M}\mathbf{\bar{u}} - \mathbf{d})\),
- Update \(\mathbf{\bar{z}} = \max\{\mathbf{a}, \min\{\mathbf{b}, -\mathbf{\bar{p}}/\mu\}\}\),
- Repeat 2 - 4 until convergence.
Let \(\Pi(\mathbf{x}) := \max\{\mathbf{a}, \min\{\mathbf{b}, -\mathbf{x}/\mu\}\}\). Then the control update can be expressed as \[\begin{align*} \mathbf{\bar{z}} = \underbrace{\Pi(\mathbf{S}_{\mathrm{B}}\mathbf{\hat{R}}(\mathbf{M}(\mathbf{h} + \mathbf{S}_{\mathrm{F}}\mathbf{\hat{R}}(\mathbf{f}+\mathbf{M}\mathbf{\bar{z}})) - \mathbf{d}))}_{\mathfrak{T}(\mathbf{\bar{z}})}, \end{align*}\] which leads to the fixed-point formulation \(\mathbf{\bar{z}}^{(n+1)} = \mathfrak{T}(\mathbf{\bar{z}}^{(n)})\).
Proposition 1. If \(\mu\kappa^{2\alpha}>1\), then \(\mathfrak{T}\) is a contraction and \((\mathbf{\bar{z}}^{(n)})_{n\in\mathbb{N}}\) converges to a unique fixed point \(\mathbf{\bar{z}}^\star\), which uniquely determines the optimal state via \(\mathbf{\bar{u}}^{\star} = \mathbf{h} + \mathbf{S}_{\mathrm{F}}\mathbf{\hat{R}}(\mathbf{f}+\mathbf{M}\mathbf{\bar{z}}^{\star})\).
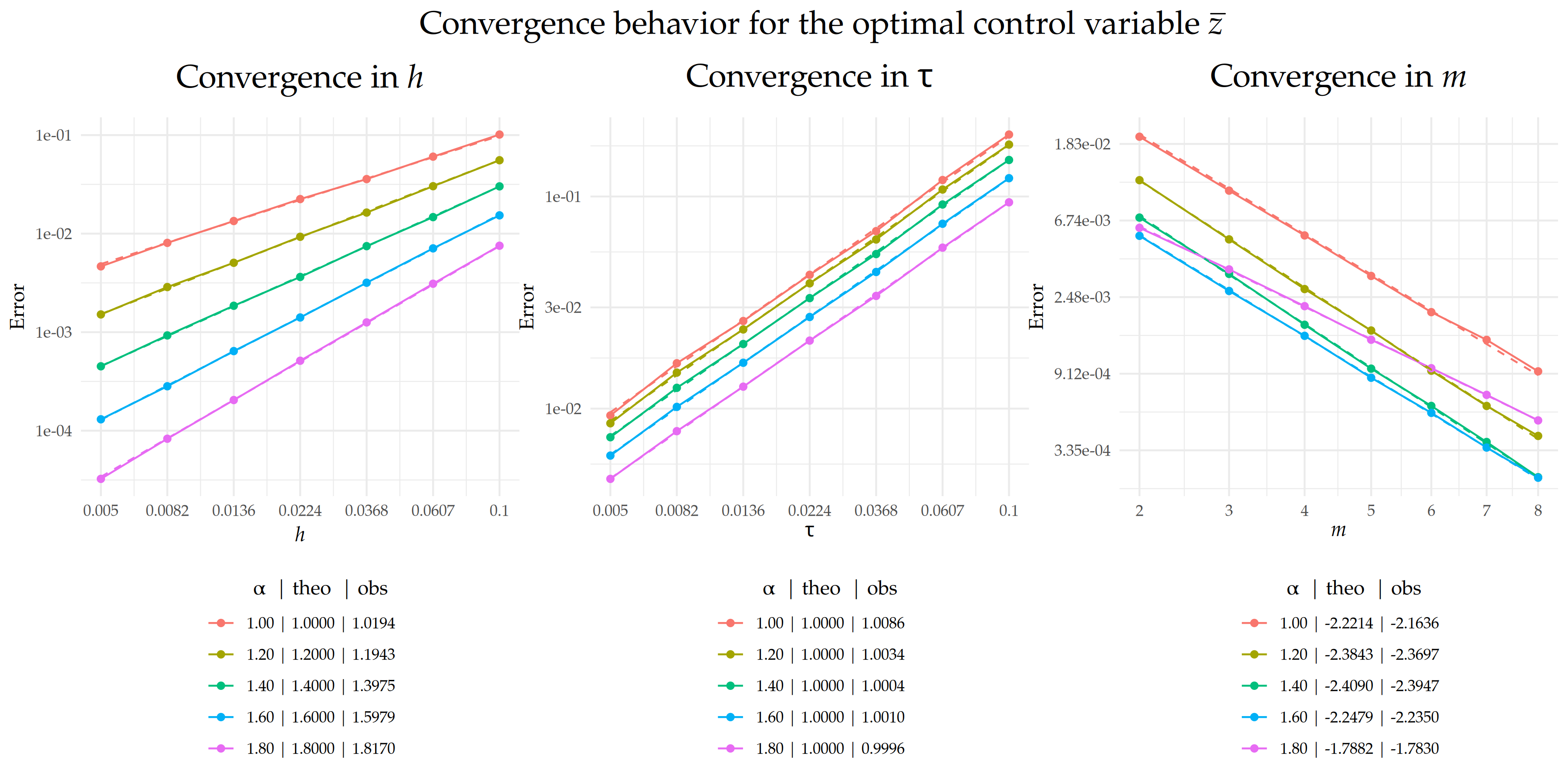
Figure 2: Comparison between theoretical and observed convergence behavior for the error \(\|\bar{z}- \bar{Z}_{h,m}^\tau\|_{L_2(\Gamma\times(0,T))}\) with respect to \(h\), \(\tau\), and \(m\).
Figure 3: Visit https://leninrafaelrierasegura.github.io/NAFDEMG/ for more information.